Join a Workgroup
Work Groups are open to public.
Anyone who wants to connect with and contribute to the Autoware community are welcome to join.
How Autoware Works?
The diagram below summarizes the purpose and interactions of the different working groups within the Autoware Foundation:

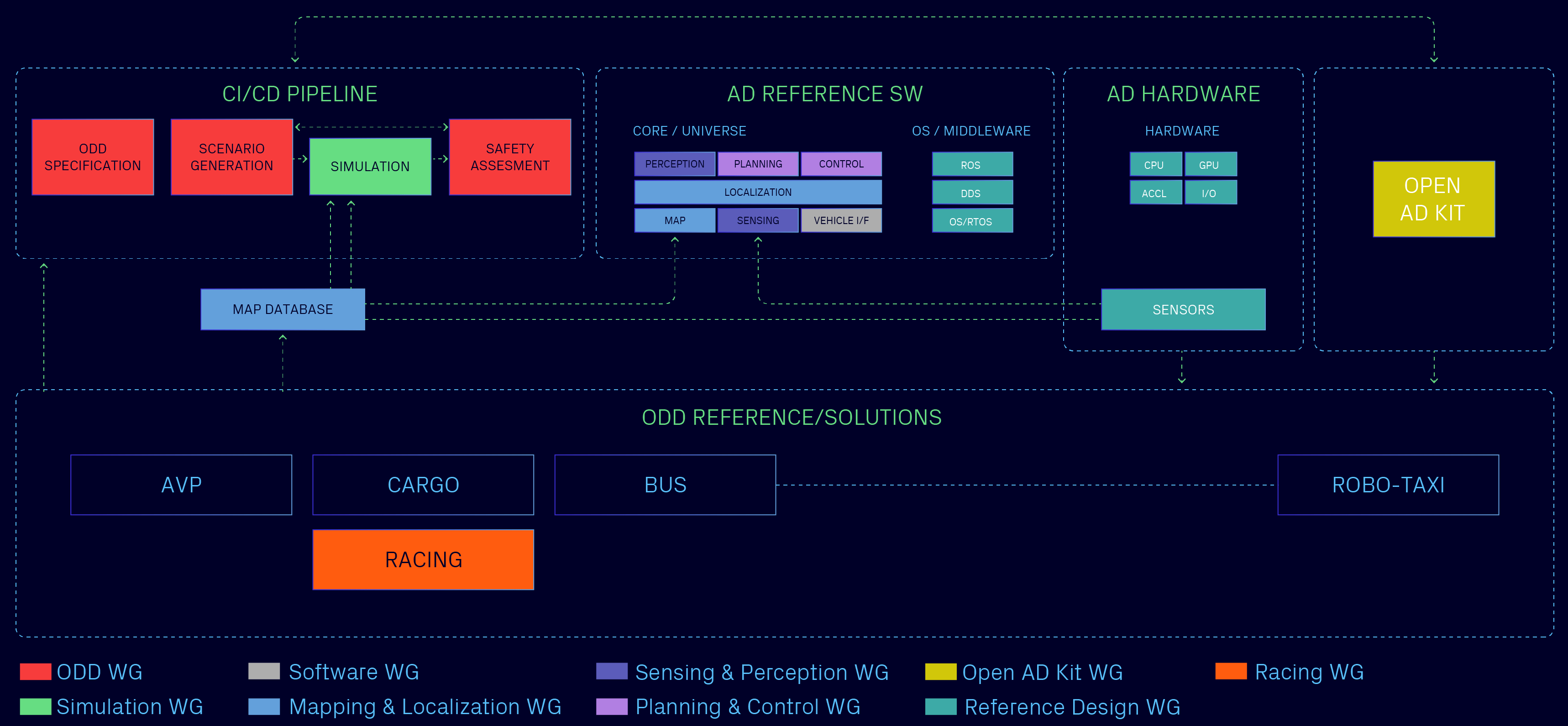{kind=link}
Working Groups
Working groups within Autoware Foundation are technical groups that focus on specific components of Autoware project.
These technical working groups are open to public. To join working groups, simply add it to your calendar. Also you can track working group activities by browsing through respective GitHub Discussions pages.
Currently, the Autoware Foundation has ten working groups. More are in the works.
The cards for specific working groups listed there are arranged by the meeting times. Meaning, the nearest working group meeting card is shown first.
WORKING GROUPS CALENDARODD working group weekly meeting
ODD specifications, scenarios and safety assessment
23:00 – 00:00 ⋅ Asia/Tokyo
Software Working Group
Overseeing the Autoware development
07:00 – 08:00 ⋅ UTC
Simulation WG
Simulation, validation and verification
08:00 – 09:00 ⋅ Europe/Warsaw
Localization & Mapping WG
Mapping technologies and autonomous vehicle localization
13:00 – 14:00 ⋅ Europe/Istanbul
Reference Design WG
Reference designs for hardware and platforms
14:00 – 15:00 ⋅ UTC
Planning & Control WG
Planning, prediction and vehicle control
17:00 – 18:30 ⋅ Asia/Tokyo
Open AD Kit WG
Transforming Autoware in a software-defined way
23:00 – 00:00 ⋅ Asia/Tokyo
Racing WG
Autonomous racing (physical and simulation)
08:00 – 09:00 ⋅ America/Los_Angeles
Sensing & Perception WG
Perception and scene understanding
19:00 – 20:30 ⋅ Asia/Tokyo
API WG
Defining crisp APIs for Autoware to interact with other platforms
05:00 – 06:00 ⋅ America/Anchorage